Grupo 07 - Intelligent assembly system for integrated optical circuits
![[Vídeo do projeto]](/projects/Group07/frame_setup.jpg)
| Equipa: |
Grupo 07: Inês Leite (Coord.) , Ana Caetano , Fábio Caldas , João Maltez , José Mestre Batista |
| Empresa: | PICadvanced S.A. |
| Orientadores: |
Arnaldo Oliveira (DETI)
Francisco Rodrigues (PICadvanced S.A.) Carla Rodrigues (PICadvanced S.A.) |
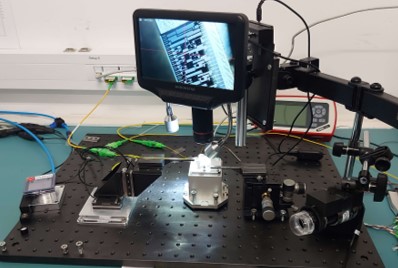
A PICadvanced desenvolveu uma plataforma automática baseada em sistemas eletromecânicos de precisão micrométrica que permitem a colocação do circuito ótico integrado no seu host e o alinhamento com as restantes interfaces óticas e elétricas. Através desta base o objetivo do projeto consistiu na automatização da plataforma do processo de encapsulamento entre as interfaces elétricas e óticas de um circuito. Esta plataforma é baseada em sistemas eletromecânicos de precisão micrométrica.
Este projeto consiste em automatizar um processo que atualmente é muito moroso e feito manualmente, alinhar uma fibra ótica a um PIC. Para se fazer esta união é preciso uma grande concentração e boa sensibilidade visto que se está a trabalhar com distâncias muito pequenas, na casas dos micrómetros.
Desafio
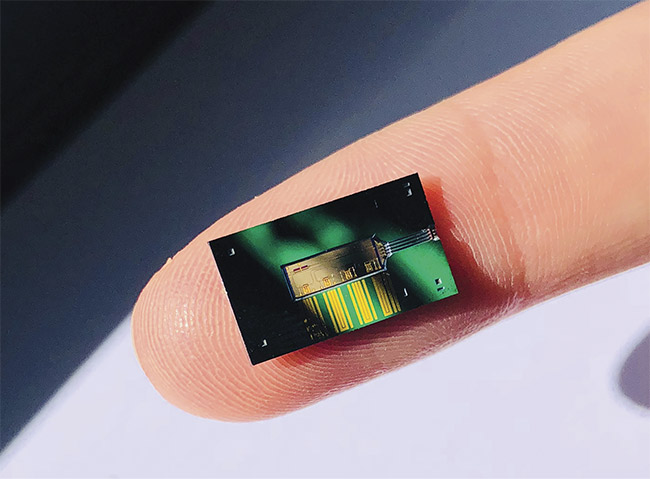
Num mundo onde o consumo global de dados e a procura por redes mais rápidas aumentam diariamente, é urgente encontrar soluções sustentáveis para a crise energética e as alterações climáticas, mantendo-se ao mesmo tempo, a par dos desafios tecnológicos. Considerando estes desafios, os photonic integrated circuits (PICs) desempenham um papel fundamental na modelagem do futuro da tecnologia. Os PICs são microchips que utilizam luz em vez de eletricidade. Utilizamo-los para detectar, gerar, transportar e processar informação. O processo de fabricação de PICs é complexo e requer um alto grau de precisão.
O desafio proposto pela PICadvanced foi de automatizar o processo de alinhamento e encapsulamento da plataforma já criada por eles. Esta, até ao momento, é feita de forma manual, podendo demorar várias horas (não considerando interferências que, existindo, reiniciam o processo). Através do sistema montado e considerando os componentes disponíveis pela empresa foi preciso criar uma solução mais eficiente. Ao analisar-se o desafio decidiu-se repartir o mesmo em partes mais elementares, que estes resultariam como base para o trabalho a desenvolver: a Interface do Utilizador, o Controlo dos Posicionadores e a Visão por Computador.
Resultados
Numa abordagem inicial e de interpretação do sistema de hardware disponível apresenta-se de seguida a arquitetura do sistema a trabalhar considerando as bases mencionadas em cima:
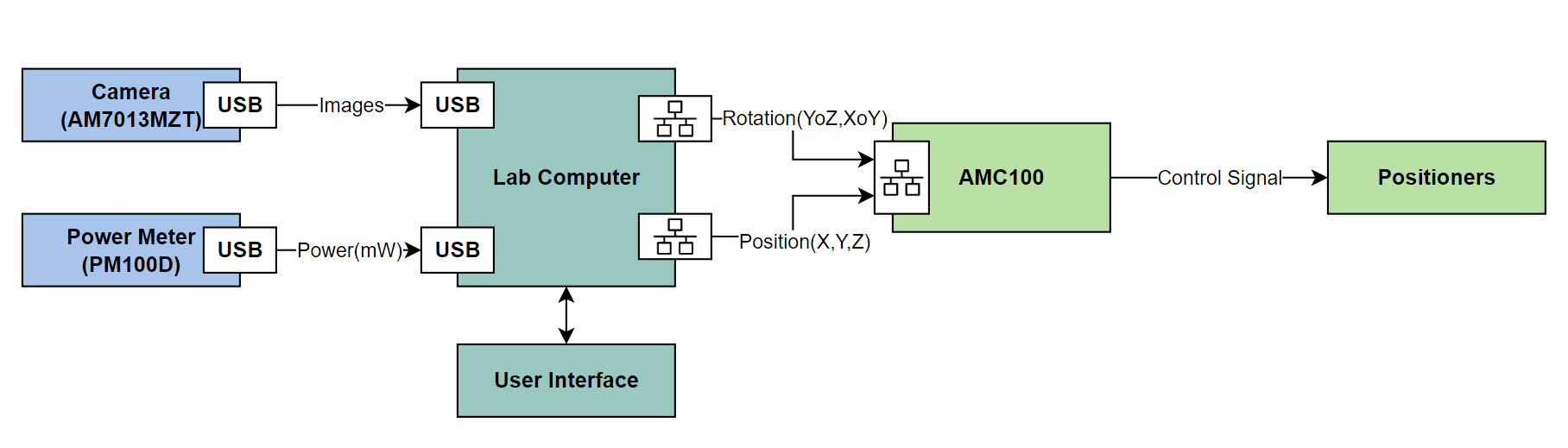
- Através da Interface do Utilizador será possível acompanhar o processo do alinhamento, assim como a visualizar resultados.
- O Controlador tem a capacidade de operar simultaneamente sobre até três posicionadores. Este, aliado a um algoritmo de Hill Climbing, permite fazer o varrimento de potência.
- A câmera é o dispositivo que fornece as imagens ao sistema. Com o intuito de complementar o controlador, recorreu-se à tecnologia de visão por computador.
- O medidor de potência é responsável pela medição da potência ótica da fibra.
1. User Interface
O design da UI foi pensado de modo a atender às necessidades e objetivos de utilização do cliente. A interface foi desenhada de modo a que a sua utilização seja simples e intuitiva. Esta foi implementada em Python tendo por base o framework “tkinter”.
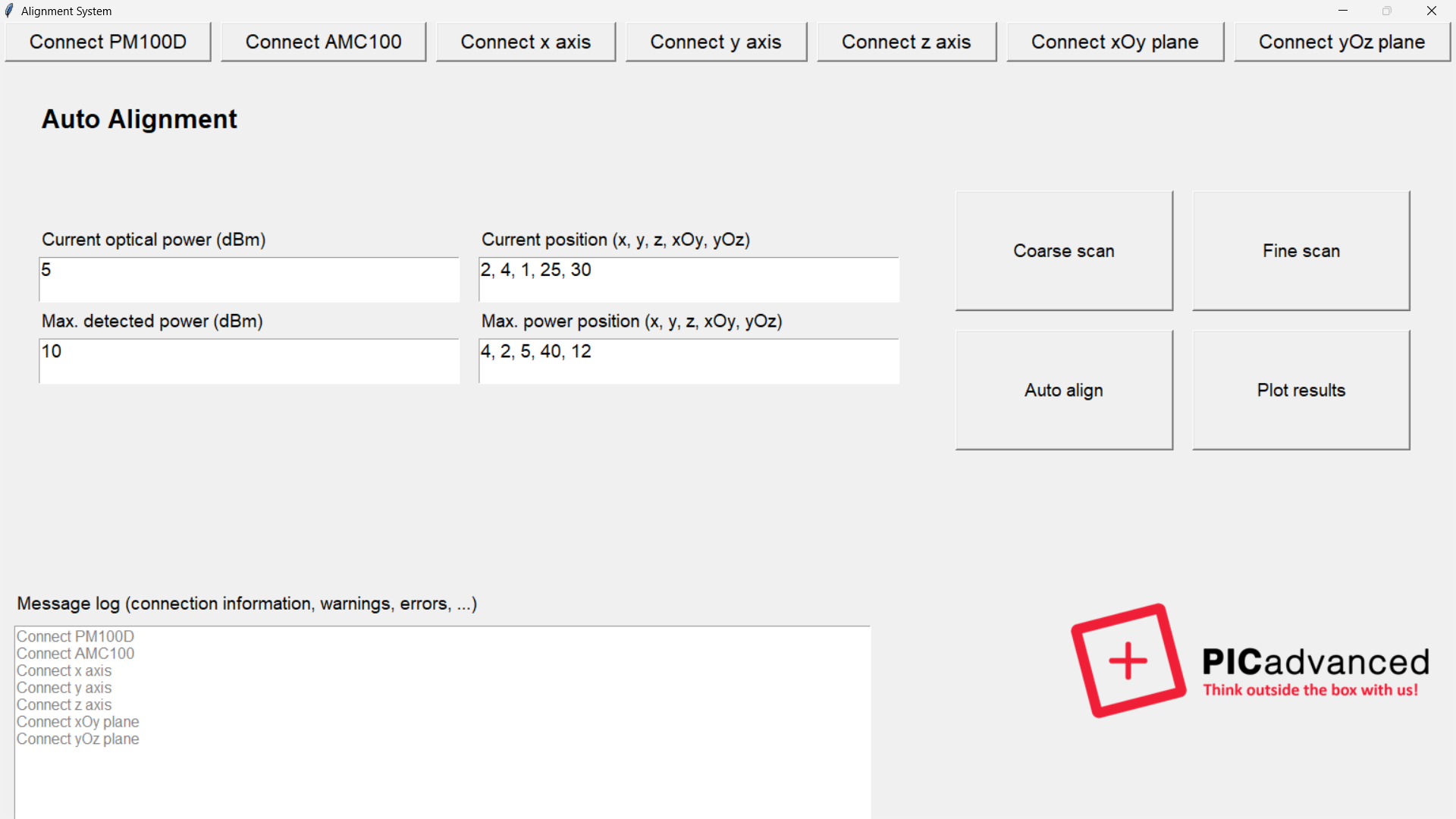
Foi implementada uma janela principal como área de interação com o utilizador. Foram adicionados botões que permitem ao utilizador realizar a conexão com os diversos dispositivos e efetuar várias ações de interesse. Apresenta também uma caixa de texto que funciona como message log, onde mostra a informação sobre a conexão dos dispositivos, mensagens de erro e avisos.
2. Controlo dos Posicionadores
No processo de encontrar a posição da fibra em que a potência transmitida pelo PIC é máxima, são incorporados algoritmos de posição e varrimento.
Para implementar eficientemente estas funções, tira-se partido de funcionalidades do componente AMC100 e da biblioteca que o controlador disponibiliza. São aplicados dois tipos de varrimentos.
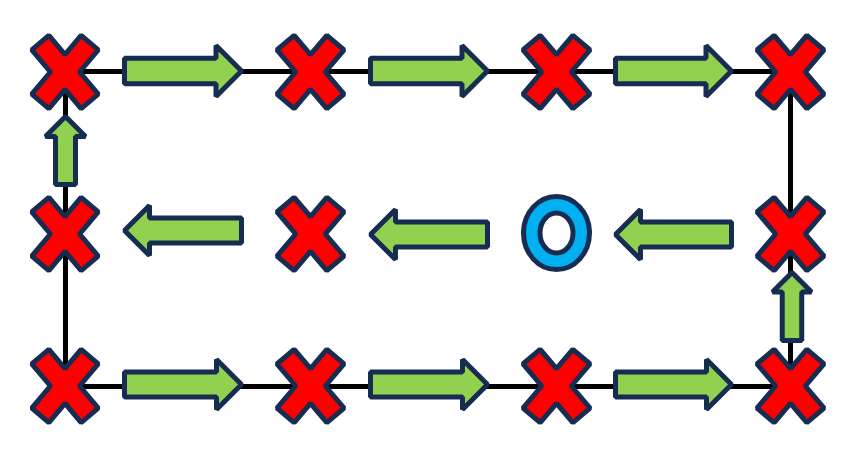
O varrimento grosseiro para obter informação mais abrangente de possíveis pontos de com valor de potência mais interessante.
O varrimento fino que acaba por também incluir o algoritmo de hill climbing. Este algoritmo é de otimização eixo a eixo, isto é, em cada iteração, este vai percorrer apenas um eixo até encontrar o seu máximo. Após o encontrar, faz o mesmo para o próximo eixo e assim sucessivamente.
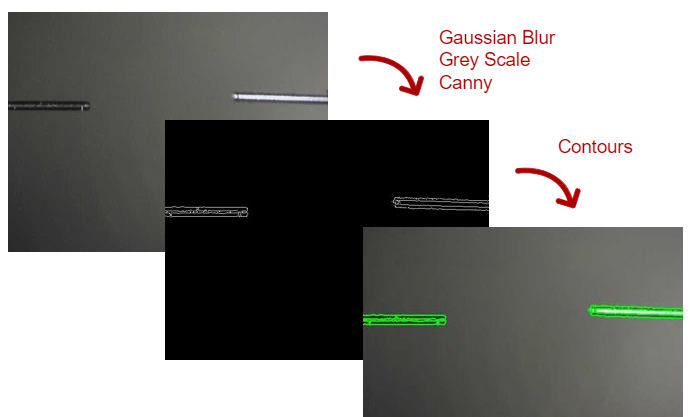
3. Visão por Computador
Através do setup montado para manipular os componentes a acoplar e com o tratamento de imagem através de várias máscaras obtém-se a identificação de fibras óticas e de PICs. Através das bibliotecas de OpenCV foram usadas várias máscaras como filtro preto e branco, seguida de uma que provoca um ligeiro desfoque da imagem para acentuar o objeto face ao plano de fundo. Aplicou-se outra com o intuito de denotar as arestas todas da imagem. E por fim, identificou-se e realçou-se os contornos dos objetos da imagem. É então calculada a distância a que cada objeto que serve para delinear a região de manipulação da fibra ótica com possibilidade de movimento.